










0.1kw - 250kw AC Kit de contrôleur de moteur servo Système d'entraînement de moteur servo
Informations de base
| Modèle NON. | VEICHI SD700 |
| Tâche | Ajuster |
| Structure | Combinaison |
| Modèle mathématique | Linéaire |
| Signal | Continu |
| Fonction | Contrôle automatique |
| Certificat | CE |
| Condition | Nouveau |
| Personnalisé | Non personnalisé |
| Matériel | Alliage d'aluminium |
| Forfait transport | Boîte en carton/bois |
| Marque déposée | VEICHI |
| Origine | Suzhou, Chine |
| Capacité de production | 600 000 PC/an |
Description du produit
>>> Présentation du système d'asservissement hautes performances de la série SD700
Les servomoteurs de la série VEICHI SD700 sont des produits de haute performance, de haute fiabilité, de haute qualité et rentables pour répondre à une variété d'environnements industriels et d'applications système critiques et obtenir la combinaison parfaite de servo et de programme.
>>> Servomoteur polyvalent haute performance SD700 - Une fusion complète de sophistication et de simplicité
- La bande passante de réponse de la boucle de vitesse peut atteindre 3kHz.
- En utilisant un encodeur absolu 23 bits, la vitesse de communication peut atteindre 2,5 Mpps.
- Réglage de la bande passante, complétez automatiquement le calcul du gain de la boucle PID.
- Logiciel PC puissant, surveillance multicanal, facile à utiliser.
- Compléter automatiquement l'identification de l'inertie, le gain de boucle, la compensation de frottement et d'autres réglages de paramètres.
- Prend en charge la fonction de contrôle des vibrations en plusieurs étapes, limite efficacement la résonance.
- Un contrôle robuste assure un fonctionnement en douceur des charges avec inertie dans les 30 fois.
- Nouvelle conception d'apparence structurelle, compacte et peu encombrante.
>>> Bande passante de réponse de boucle de vitesse de 3 kHz
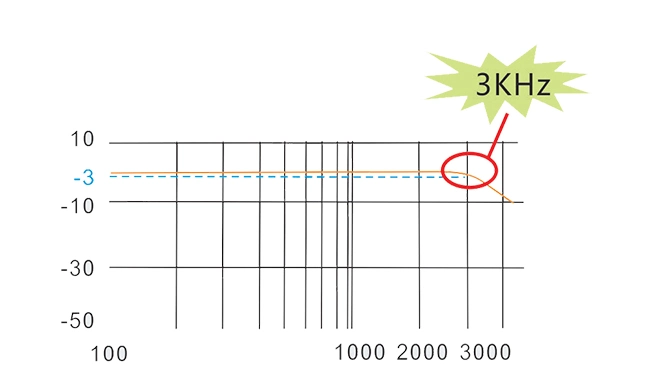
Grâce à l'algorithme de boucle de courant unique, la bande passante de la boucle de vitesse est effectivement augmentée et le temps de réglage est considérablement raccourci. Le temps de réglage le plus rapide peut atteindre 1 ms, ce qui améliore l'efficacité de la production.
>>> Codeur absolu 23 bits
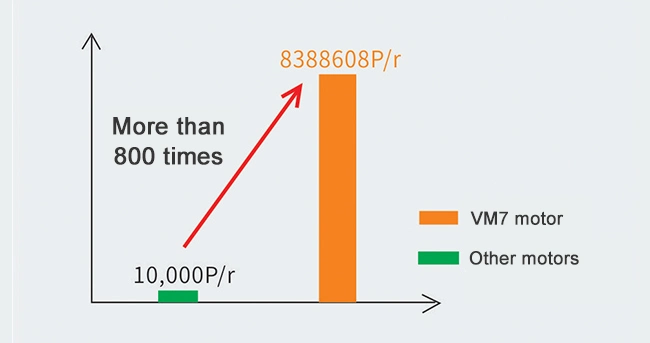
- Codeur absolu multitours 23 bits standard, monotour jusqu'à 8388608 impulsions, vitesse de communication jusqu'à 2,5 Mpps.
- Le positionnement est plus précis, la basse vitesse est plus stable et la position de mise hors tension n'est pas perdue.
>>> Contrôle robuste
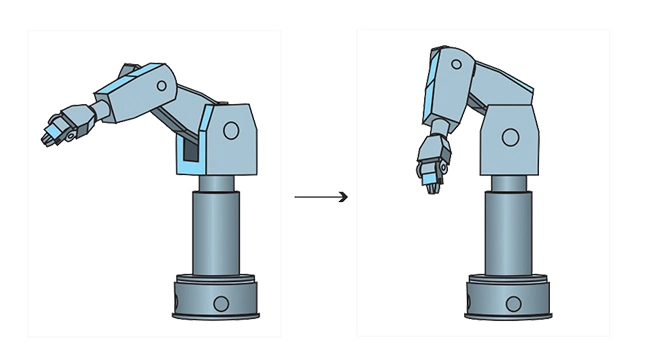
- Le nouvel algorithme de théorie de contrôle est adopté pour réaliser que même si le moment d'inertie de la charge change dans les 30 fois pendant le mouvement, il n'est pas nécessaire de définir les paramètres esclaves pour assurer un fonctionnement fluide.
- Il peut être utilisé après l'installation. Cette fonction est largement utilisée dans les manipulateurs.
>>> Prend en charge le mode en boucle fermée complet
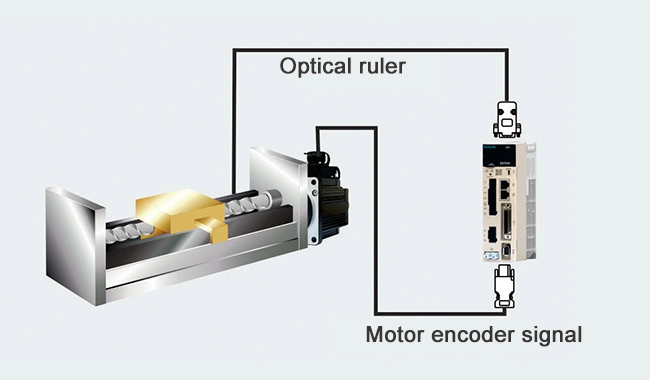
Le mode en boucle entièrement fermée prend en charge un deuxième encodeur externe ou une règle de réseau, ce qui réduit les erreurs causées par l'écart de transmission mécanique et améliore la précision de positionnement. Tous les modèles sont équipés de cette fonction.
>>> La fonction de contrôle des vibrations à basse fréquence
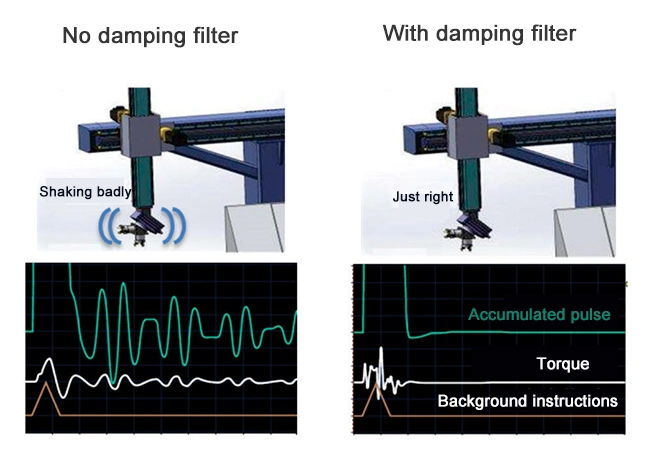
Le filtre d'amortissement peut être réglé via le logiciel de l'ordinateur hôte, ce qui peut éliminer efficacement la fréquence de vibration inhérente, réduire considérablement les vibrations (tremblements) de l'arbre lors de l'arrêt et supprimer efficacement les vibrations de fréquence 0 ~ 100Hz. Cette fonction est couramment utilisée pour éliminer les robots de moulage par injection et les empileurs. L'extrémité tremble à l'arrêt.
>>> Réglage automatique du filtre coupe-bande
- Il n'est pas nécessaire d'effectuer une mesure et une analyse complexes de la fréquence des vibrations, et le filtre coupe-bande peut être rapidement recherché et réglé automatiquement pendant le processus de réglage des paramètres grâce à la fonction de réglage de paramètre unique de l'ordinateur hôte.
- Simple et facile à utiliser, le plus rapide ne dépasse pas 70ms. Il peut réduire considérablement le bruit et les vibrations causés par la résonance mécanique de l'équipement, pour obtenir une action de réponse plus rapide. Cette fonction est largement utilisée dans les machines-outils.
>>> Réglage intelligent
Réglage automatique du gain, mode de réglage guidé, le réglage séquentiel peut compléter le réglage du gain servo, simple et facile à utiliser. Fournit plus de modes de réglage, qui peuvent être ajustés en fonction de différentes structures mécaniques et caractéristiques de processus, afin que la machine puisse atteindre un état approprié.
>>> Puissante fonction de communication par bus
Prend en charge RS-485, EtherCAT, CANopen, MECHA-METROLINK, MECHATROLINK et d'autres bus grand public.
>>> Réduisez considérablement le couple de pulsation du moteur et le fonctionnement à basse vitesse est plus stable
Il adopte un rotor à 10 étages et une conception de broche à 12 fentes. Grâce à une conception de circuit magnétique spéciale, l'effet de cogging est efficacement supprimé et l'ondulation du couple est considérablement réduite, garantissant ainsi que le moteur fonctionne plus en douceur à une vitesse constante et à basse vitesse.
>>> Logiciel PC puissant
- Pas besoin d'installer et de déboguer un logiciel.
- Communication USB entre le lecteur et l'ordinateur, facile à utiliser.
>>> Applications industrielles pour le système d'asservissement haute performance de la série SD700
Applications : équipements de fabrication électronique, équipements à commande numérique, machines d'emballage, machines d'impression, machines textiles, machines en plastique et équipements en verre, équipements de test, etc.
>>> Spécifications
| Projet | Caractéristiques | ||||||
| Plage de puissance | 0.1kW - 55kW, personnalisé jusqu'à 250kW | ||||||
| Mode de contrôle | IGBT, contrôle PWM et mode d'entraînement de courant sinusoïdal | ||||||
| Retour | Combinaison moteur rotatif | Codeurs de communication série : 17 bits, 20 bits et 24 bits (codeur absolu) | |||||
| Encodeur d'impulsions: encodeur linéaire provincial-2500 lignes | |||||||
| Codeur de type transformateur rotatif | |||||||
| Conditions environnementales | Température de l'environnement | Température ambiante : -5ºC-55ºC (réduire l'utilisation des cotes lorsqu'il est de 55ºC-60ºC) | |||||
| Température de stockage | -20ºC~85ºC | ||||||
| Humidité de l'environnement de fonctionnement | moins 95% HR (sans congélation ni givrage) | ||||||
| Humidité de stockage | moins 95% HR (sans congélation ni givrage) | ||||||
| Résistance aux vibrations | 4.9m/s² | ||||||
| Résistance aux chocs | 19.6m/s² | ||||||
| Niveau de protection | IP20 | ||||||
| Propreté | Pas de gaz corrosif et inflammable | ||||||
| Pas d'éclaboussures d'eau, d'huile et de pharmacie | |||||||
| Utilisé dans un environnement avec moins de poussière, de sel et de poudre métallique | |||||||
| Altitude | moins de 1000m (vous pouvez réduire l'utilisation des cotes quand c'est 1000-2000m) | ||||||
| Autres | Aucune interférence d'électricité statique, fort champ électrique, fort bruit magnétique, rayonnement, etc. | ||||||
| Norme applicable | IN 61800-5-1:2007 EN 61800-3:2004/A1:2012 | ||||||
| Type d'installation | Type de montage de base : tous les modèles | ||||||
| Type de montage sur étagère : tous les modèles | |||||||
| Performance | Plage de contrôle de vitesse | 1:6000 (la limite inférieure de la plage de contrôle de vitesse est la valeur en condition non-stop à la charge de couple nominale) | |||||
| Taux de fluctuation de vitesse | Fluctuation de charge | Moins ±0,01 % de la vitesse nominale (fluctuation de charge : 0 % à 100 %) | |||||
| Fluctuations de tension | 0 % de la vitesse nominale (±10 % de la tension nominale) | ||||||
| Fluctuations de température | En dessous de ±0,1 % de la vitesse nominale (variation de température : 25 ± 25 °C) | ||||||
| Précision du contrôle du couple | ±1 % | ||||||
| Réglage de l'heure de démarrage progressif | 0~10s (l'accélération et la décélération peuvent être réglées séparément) | ||||||
| Fonction de communication | RS-485 | Communication 1:N | Lors de l'utilisation du port RS-485, N max = 127 stations | ||||
| Réglage de la position de l'axe | Par paramétrage | ||||||
| Communications USB | Matériel connecté | Ordinateur | |||||
| Protocole | Selon la spécification USB1.1 (12M) | ||||||
| Fonction d'affichage | Témoin de charge | ||||||
| Fonction de fonctionnement du panneau | Interrupteur à bouton-poussoir × 4 | ||||||
| Signaux d'entrée et de sortie | Sortie d'impulsion du diviseur d'encodeur | Phase A, phase B et phase C: le nombre d'impulsions de fréquence de transmission d'entraînement linéaire peut être librement défini | |||||
| Signal d'entrée de séquence | Entrée fixe | Plage de tension de fonctionnement : 5 V CC ± 5 % | |||||
| Points d'entrée : 1 point | |||||||
| Signal d'entrée de demande de données absolues du codeur (SEN) | |||||||
| Signal d'entrée assignable | Plage de tension de fonctionnement : DC24V±20 % | ||||||
| Points d'entrée : 9 points | |||||||
| Méthode d'entrée : entrée de collecteur commune et entrée d'émetteur commune | |||||||
| Signal d'entrée | |||||||
| Servo activé (/S-ON) | |||||||
| Fonctionnement P/P-CON | |||||||
| Signal de commutateur de décélération de réinitialisation à la maison (/DEC) | |||||||
| Interdiction de marche avant (P-OT) et interdiction de marche arrière (N-OT) | |||||||
| Réinitialisation d'alarme (/ALM-RST) | |||||||
| Limite de couple externe avant (/P-CL) et limite de couple externe arrière (/N-CL) | |||||||
| Signal de sélection du sens de rotation de la vitesse (/SPD-D) | |||||||
| Commutateur de mode de contrôle (/C-SEL) | |||||||
| Fixation de la position zéro (/ZCLAMP) | |||||||
| Désactivation de l'impulsion de commande (/INHIBIT) | |||||||
| Signal d'entrée de détection de pôle magnétique (/P-DET) | |||||||
| Commutation de gain (/G-SEL) | |||||||
| Commutateur de priorité d'entrée d'impulsion de commande (/PSEL) | |||||||
| Signal d'entrée SEN (/SEN) | |||||||
| Signaux assignables et logique positive/négative modifiable | |||||||
| Signal de sortie séquentiel | Sortie fixe | Plage de tension de fonctionnement : DC5V~30V | |||||
| Points de sortie : 1 point | |||||||
| Signal de sortie : alarme servo (ALM) | |||||||
| Signal de sortie assignable | Plage de tension de fonctionnement : DC5V~30V | ||||||
| Points de sortie : 3 points | |||||||
| Méthode d'entrée : sortie de coupleur opt (type isolé) | |||||||
| Signal de sortie | |||||||
| Positionnement terminé (/COIN) | |||||||
| Caisse rotative (/TGON) | |||||||
| Servo prêt (/S-RDY) | |||||||
| Détection de limite de couple (/CLT) | |||||||
| Vérification de la limite de vitesse (/VLT) | |||||||
| Freins (/BK) | |||||||
| Avertissement (/WARN) | |||||||
| Localiser à proximité (/NEAR) | |||||||
| Signaux assignables et logique positive/négative modifiable | |||||||
| Frein dynamique | Fonctionnement dans le circuit principal hors tension, alarme servo, servo OFF et surcourse (OT) | ||||||
| Régénérateur | Fonction intégrée | ||||||
| Protection contre les surcourses (OT) | Arrêt du frein dynamique (DB), arrêt par décélération ou arrêt en roue libre pendant le fonctionnement de l'entrée P-OT ou N-OT | ||||||
| Fonction de protection | Surintensité, surtension, sous-tension, surcharge, défauts de régénération, etc. | ||||||
| Fonction d'accessibilité | Réglage du gain, enregistrements d'alarme, fonctionnement JOG, recherche d'origine, etc. | ||||||
| Fonction de sécurité | Saisir | STO : base du signal de blocage du module de puissance | |||||
| Methode de CONTROLE | Contrôle de position | Compensation anticipée | 0 % ~ 100 % | ||||
| Emplacement atteindre organiser | 0~1073741824 unité d'instructions | ||||||
| Signal d'entrée | Impulsion de commande | Forme d'impulsion de commande | Choisissez l'une des options suivantes | ||||
| Séquence de symboles et d'impulsions, séquence d'impulsions CW + CCW, différence de phase de 90 ° et impulsion biphasée | |||||||
| Formulaire de saisie | Entraînement linéaire et collecteur ouvert | ||||||
| Fréquence d'entrée maximale | Conducteur de ligne | ||||||
| Symbole + séquence d'impulsions, séquence d'impulsions CW + CCW : 4 Mpps | |||||||
| Impulsion biphasée de différence de phase de 90° : 1Mpps | |||||||
| Collecteur ouvert | |||||||
| Symbole + séquence d'impulsions, séquence d'impulsions CW + CCW : 200 Kpps | |||||||
| Impulsion biphasée de différence de phase de 90° : 200Kpps | |||||||
| Commutateur de priorité d'entrée | 1 ~ 100 fois | ||||||
| Signal clair | Correction de l'écart de position | ||||||
| Contrôle de vitesse | Réglage de l'heure de démarrage progressif | 0~10s (l'accélération et la décélération peuvent être réglées séparément) | |||||
| signal d'entrée | Tension de commande | Tension d'entrée maximale : ± 10 V (rotation avant du moteur lorsqu'une tension positive est commandée) | |||||
| Vitesse nominale à DC6V [réglage d'usine] | |||||||
| Réglage du gain d'entrée modifiable | |||||||
| Résistance d'entrée | Environ 14KΩ | ||||||
| Paramètre de temps de boucle | 30μs | ||||||
| Contrôle de vitesse réglé en interne | Sélection du sens de rotation | Utiliser le signal de fonctionnement P | |||||
| Sélection de la vitesse | Utilisation de l'entrée de signal de limite de couple externe avant/arrière | ||||||
| Arrêtez ou passez à un autre mode de contrôle lorsque les deux côtés sont éteints | |||||||
| Contrôle du couple | Signal d'entrée | Tension de commande | Tension d'entrée maximale : ± 10 V (rotation positive du moteur lorsqu'une tension positive est commandée) | ||||
| Vitesse nominale à DC6V [réglage d'usine] | |||||||
| Réglage du gain d'entrée modifiable | |||||||
| Résistance d'entrée | Environ 14KΩ | ||||||
| Paramètre de temps de boucle | 16μs | ||||||
>>> À propos de VEICHI